煤矿四足机器人巡检无线充电:复杂环境下的自主回充方案
煤矿巡检场景正在从人工巡检、固定摄像头监控,逐步走向移动机器人自主巡检。相比轮式或轨道式机器人,四足机器人具备更强的越障能力和地形适应性,适合煤矿变电所、井下巷道、皮带廊道、泵房等环境复杂、通道不规则的区域。要让四足机器人真正实现长期无人值守,除了导航、感知和避障能力,无线充电也是关键基础设施。
一、煤矿四足机器人巡检系统的核心能力
《智能矿山》刊载的“煤矿四足机器人巡检系统设计与研发”提出,煤矿四足机器人巡检系统需要集成激光雷达、惯性测量单元、腿部关节编码器等多传感器融合能力,并结合自主导航算法,实现自主建图、路径规划、动态避障和自主充电。
- 自主建图:利用激光雷达识别巷道、设备间和巡检通道空间结构;
- 路径规划:根据巡检点位自动生成行走路线,减少人工遥控依赖;
- 动态避障:面对临时障碍物、人员和设备变化时自动调整路线;
- 环境采集:搭载摄像头、热成像、气体、温湿度等模块完成巡检;
- 自主回充:电量不足或任务完成后自动返回充电点补能。
二、为什么四足机器人更适合无线充电
四足机器人通常承担高频次、长时间、跨区域巡检任务。如果仍然依靠人工插拔充电,就会削弱无人化巡检的价值。煤矿环境中还存在粉尘、湿气、震动和易燃易爆风险,裸露触点容易带来氧化、接触不良、维护频繁等问题。
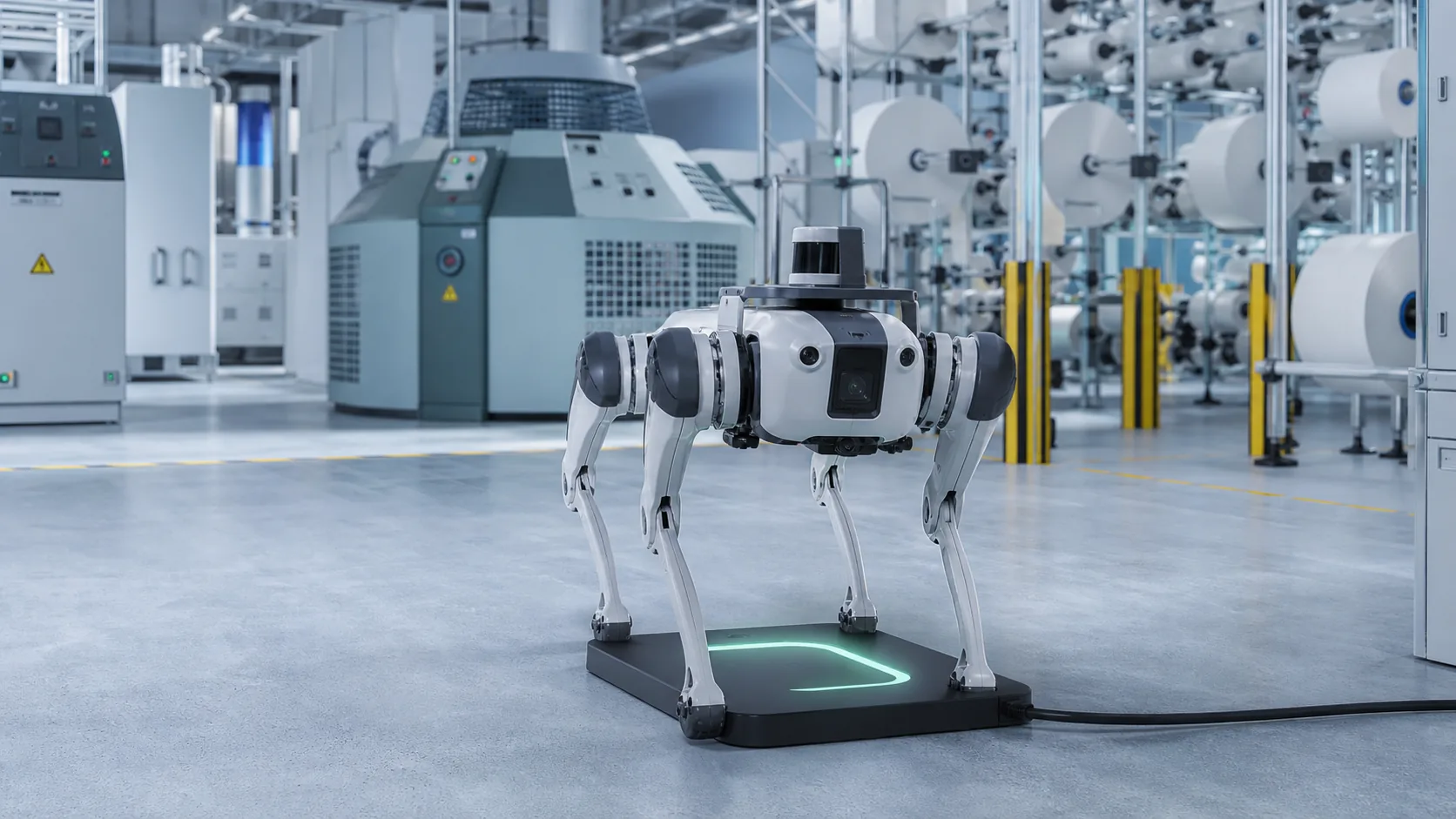
无线充电的非接触补能方式更适合四足机器人:机器人只需自主走到充电位,保持接收端与发射端在允许偏移范围内,即可自动启动充电。论文摘要中提到,系统测试中无线充电定位精度小于 5 cm,这类精度已经能够支撑固定充电点的自动回充应用。
| 对比项目 | 接触式充电 | 无线充电 |
| 对接方式 | 需要触点或插头精准接触 | 允许一定位置偏差,停靠更友好 |
| 环境适应性 | 易受粉尘、潮湿、氧化影响 | 无裸露电极,可做密封防护 |
| 维护成本 | 触点磨损后需要清洁、更换 | 无机械接触,维护量更低 |
| 安全性 | 存在接触火花和漏电隐患 | 非接触传输,适合高安全要求场景 |
| 无人化程度 | 常需要人工检查对接状态 | 可与导航系统联动自动回充 |
三、煤矿变电所巡检中的补能逻辑
煤矿地面变电所、井下变电所和配电硐室通常设备密集、巡检点位固定,适合部署四足机器人和固定无线充电座。机器人按计划巡检开关柜、变压器、电缆沟、仪表、温升和环境状态,任务结束后自动返回充电点。
- 机器人根据任务路线完成设备巡检和数据采集;
- 电量低于阈值或任务结束后,系统触发自主回充;
- 机器人通过导航定位进入无线充电区;
- 发射端与接收端通信确认后启动充电;
- 充电状态、电池温度、故障信息上传至巡检平台。
四、无线充电系统设计要点
四足机器人无线充电方案不应只看功率大小,还要结合机器人底盘结构、充电姿态、停靠精度、任务频次和煤矿现场安全要求设计。
- 安装位置:发射端可布置在墙侧、地面或固定支架上,接收端根据机器人姿态选择侧面或底部安装;
- 定位容差:应与机器人自主导航精度匹配,避免对位过严导致回充失败;
- 防护等级:煤矿场景建议关注防尘、防水、防腐蚀和外壳强度;
- 通信接口:与BMS、机器人控制器和巡检平台联动,实时反馈充电状态;
- 安全保护:过温、过压、过流、异物检测和异常停机保护不可省略。
五、对煤矿智能巡检的价值
论文摘要显示,煤矿四足机器人在实际场景测试中可实现自主流畅移动,完成环境数据采集与实时监测,巡检速度最高为 0.6 m/s。对于煤矿巡检系统来说,这意味着四足机器人已经具备从“能走”到“能巡检、能回充、能持续运行”的落地基础。
无线充电的加入,可以把四足机器人从单次任务设备变成长期在线设备。机器人不再依赖人工插拔,也不需要频繁更换电池,巡检系统能够按班次、按路线、按告警任务自动运行,更符合煤矿智能化建设对减人、增安、提效的要求。
结语
煤矿四足机器人巡检系统的发展,核心不只是机器人本体性能提升,还包括导航、感知、通信、补能和平台联动的系统化能力。无线充电让四足机器人具备自动回充和无人值守运行条件,是煤矿巡检机器人从示范应用走向常态化运行的重要一环。
参考资料:付鑫、朱西硕《煤矿四足机器人巡检系统设计与研发》,《智能矿山》2025年第6卷第11期,71-75页。